GAVE Lab
The subsonic closed loop wind tunnel of the GAVE Lab has a 1 meter squared test section.
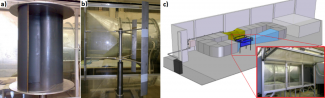
The wind tunnel is of rectangular shape, is 30 m long, and has a sufficient length to ensure the uniformity of the flow across the test section. The wind tunnel can be divided into four different zones: the first zone (downstream the test section) includes a diverging portion of increasing rectangular section, whose task is to recover part of the kinetic energy; two (90deg) curves follow, guiding the flow toward the inlet of the fan. Upstream the fan, orifices are provided in order to prevent the wind tunnel pressurization due to the air heating during steady state operation. The second zone is constituted by the axial fan, which is driven by a three-phase AC motor (55kW) mounted on a special cradle inside the cylindrical duct which encloses the impeller. The possibility to adjust the engine rotation speed by means of a Variable-Frequency Drive (VFD), allows one to obtain variable speed in the test section, and then to recreate different operating conditions. The third zone, located downstream the fan, includes other two curves (this time with guide vanes), that allow the curvature of the flow without introducing flow distortions or significant secondary flows. Finally, a convergent duct (with a contraction ratio equal to 4:1) accelerates the flow up to the rated speed on the input section of the test area (this is subsonic wind tunnel, then air can be considered incompressible). Upstream the convergent there is an "honeycomb", in order to make the flow uniform (elimination of any macro-turbulence). The last zone is constituted by the test section composed with side walls made of transparent polycarbonate. This material allows one the use of non-intrusive laser measurements. Moreover, its structure consists of a Rexroth aluminum frame. In the test section, a three-axis Cartesian robot controls the position of a hot-wire probe for measuring the wind speed. The upper closure panel of the test volume is formed, therefore, by two polycarbonate half-panels, between which is inserted the wind speed probe; the two panels are movable, in order to allow the horizontal displacement of this probe.
The three-axis Cartesian robot is basically composed of the following elements: stepper motors; control and driving boards; profiles and guides (traversing).